The RAMAN Lab is a leading research laboratory with strong expertise in designing of robot, modeling and control. The lab deeply explores the mechatronics challenges & solutions, state-of-art intelligent control algorithm and reinforcement learning. Our lab mainly focused on the real-time implementation biped robot, quad-copter and robotic arm. The research activities are focused on the development of advancement of robotic machines with target to assist the human beings in hazardous environment. Basically, our research work focused on three directions:
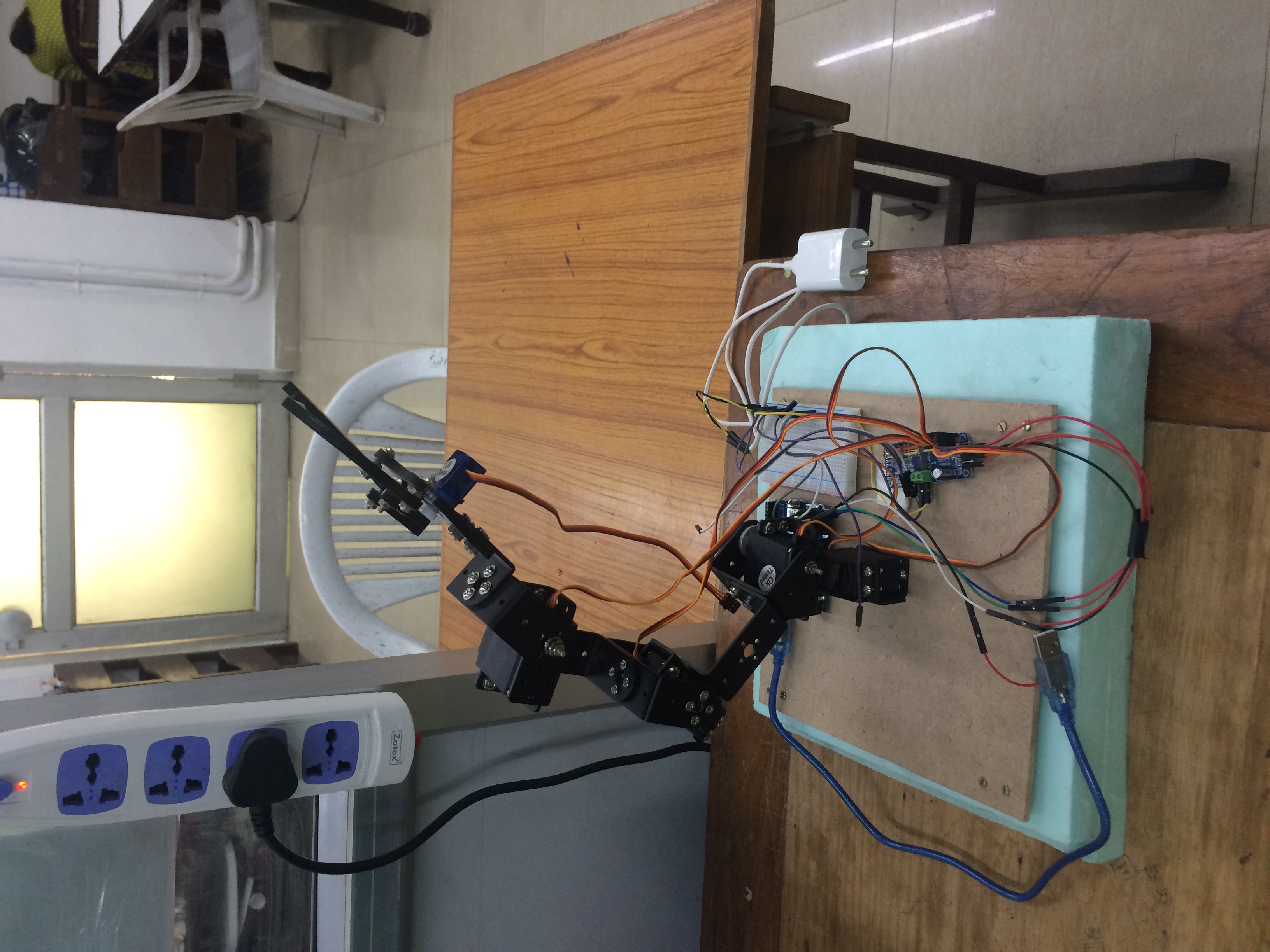
Robotic arm
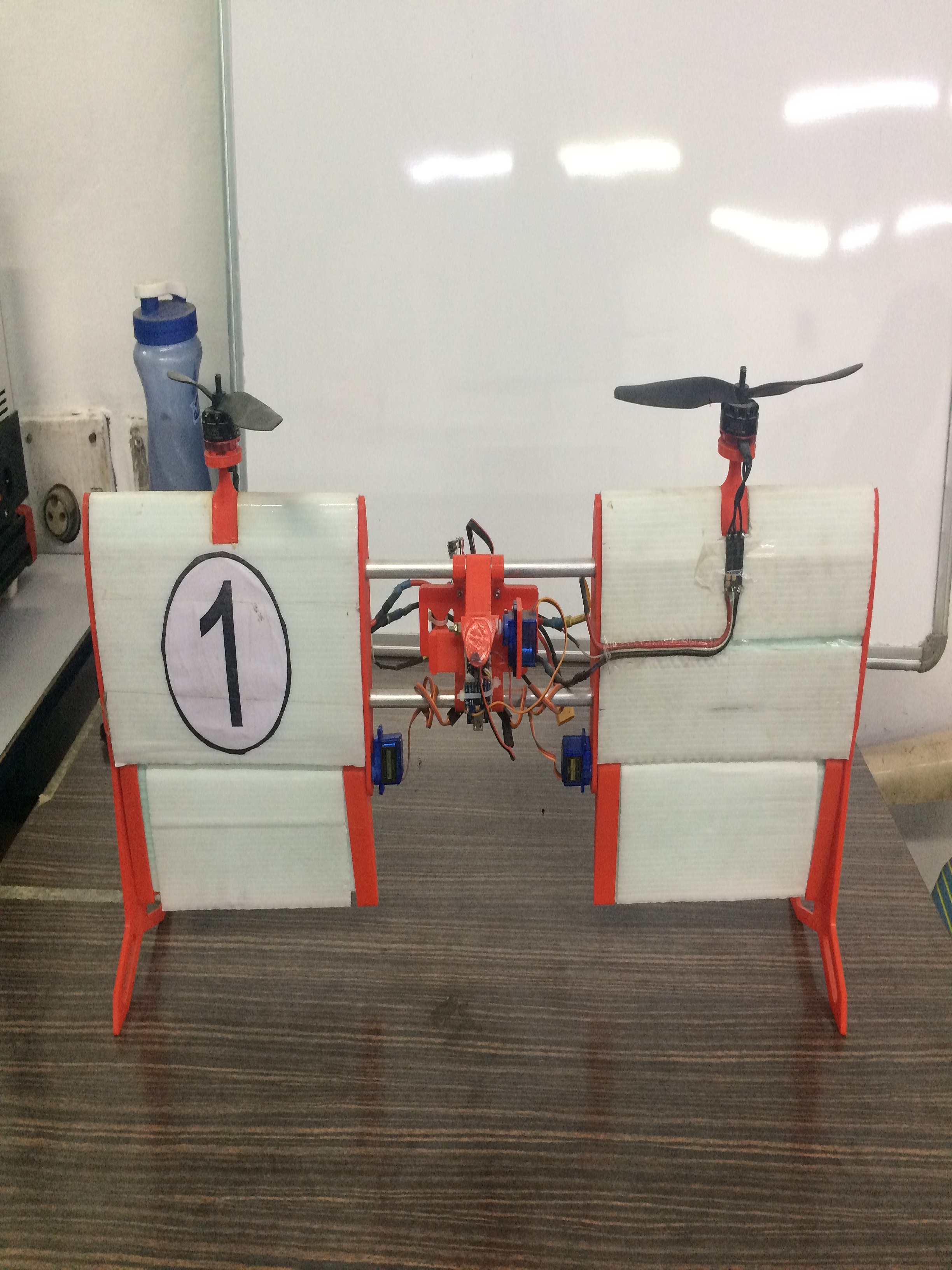
Quadcopter
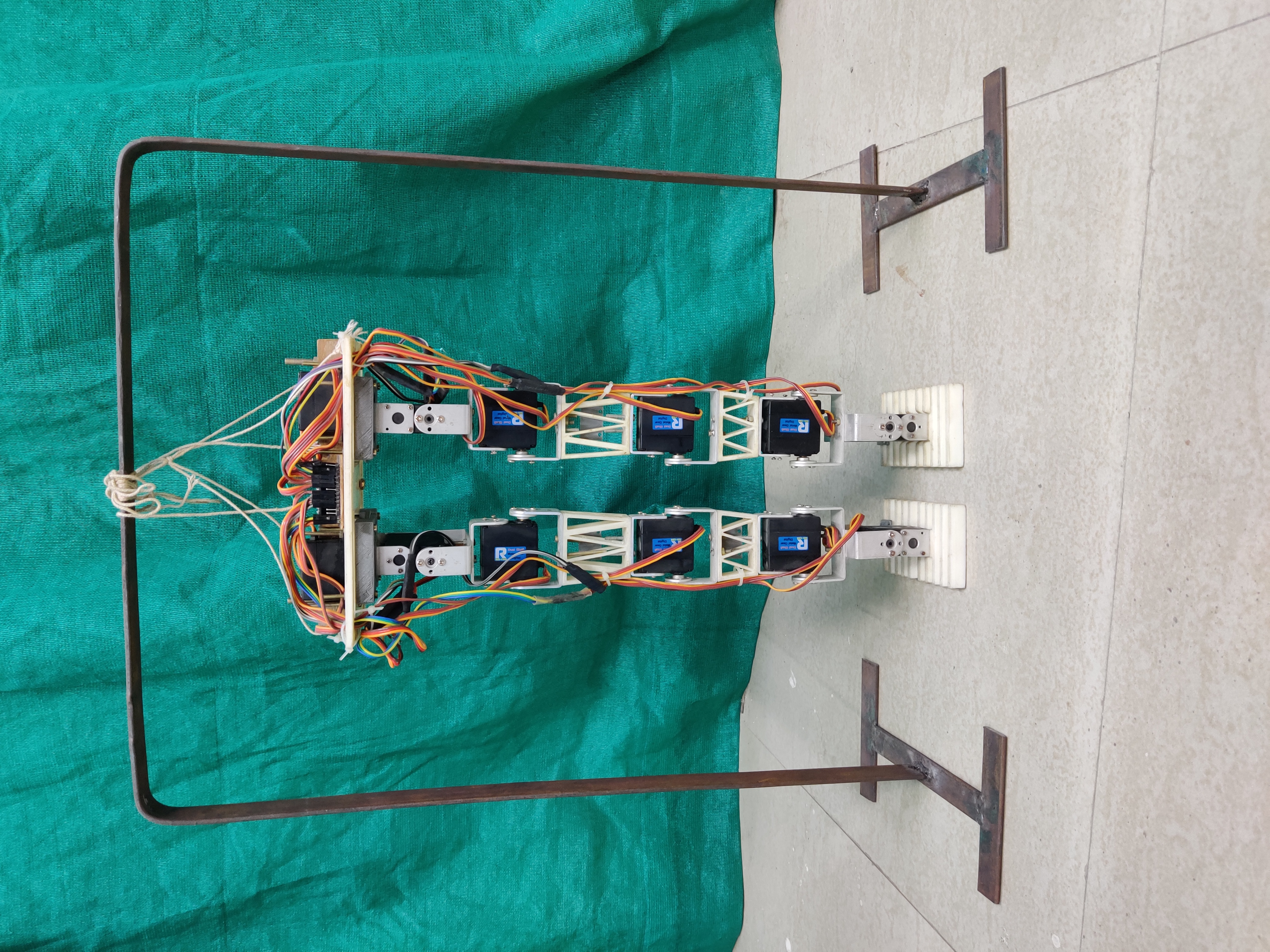
Biped

Mechatronic
A biped robot is a walking robot that mimics the human being walking pattern and can be applied in real-world environment. Our lab mainly focuses on the development of the whole body controller, trajectory generation for reference to controller, stability analysis and disturbance rejection.
In recent times, autonomous aerial vehicles have found the application in the field of military/civilian such as the surveillance, disaster management, rescue mission or package delivery etc. It is essential to carry out the mission in safe as well as fast in the presence of the external disturbances. However, it is very complex task to control the aerial vehicles because of stability, nonlinearity, external disturbances etc. Our research work is mainly focus on the development of robust intelligent algorithms and development of stability criteria.
A manipulator is like a human hand, it consists of multiple links connected serially/parallel. Since, the advancement in computer science field, robots have become smarter and more efficient. In our work, we are mainly focus on the learning framework for low cost manipulators.
Line follower robot is one of the first robots where the beginners and students would get their first hands-on experimentation. In this area, we have work on development of the line following using the arduino and raspberry pi. Additionally, we have mainly focused on the development of the computer vision based control of the wheeled mobile robot.
In this section, our research team mainly focused on the advanced design tools to develop the light weight structures of various robot, selection of kinematics, and software development for interfacing purpose.
For this section, our research team focused on the development of the complete learning framework using the combination of the Intelligent Control Algorithm, Soft- computing Approaches, Machine learning, Bayesian Statistics, and Deep Learning Approaches.